Servomecanism - Variator de turație
Racheta Bomarc a constituit în periada anilor 60 arma esențială din dispozitivul de apărare antiaeriană american și canadian și a fost construită în două variante, IM 99 A și IM - 99 B.
Rachetele IM-99 A erau echipate cu un motor-rachetă cu combustibil lichid (kerosen și acid nitric) Aerojet - General LR 59 AG 13, situat în partea posterioară a fuzelajului, și două motoare statoreactoare Marquardt RJ 43-MA-3, care utilizau benzină cu cifra octanică CO 80.
Motorul-rachetă cu combustibil lichid făcea ca racheta Bomarc să decoleze vertical și să accelereze până la o viteză subsonică foarte ridicată. După aceea, cele două statoreactoare asigurau propulsia, plasând racheta la altitudinea prevăzută și funcționând la puterea maximă până în momentul în care ținta era atinsă.
Rachetele Bomarc B aveau în loc de motor-rachetă cu combustibil lichid un motor-rachetă cu pulbere fabricat de firma Thiokol Chemical Corporation. În acest mod se câștiga mai mult spațiu în interiorul fuzelajului și a fost folosit pentru a transporta mai mult carburant pentru cele două motoare statoreactoare, care și ele la rândul lor au fost îmbunătățite și transformate pentru a putea utiliza carburantul JP 4 pentru turboreactoare, combustibil care se găsește pe toate bazele aeriene militare.
În timpul încercărilor în zbor, statoreactoarele de mare putere au funcționat la altitudini de 30 000 m și la viteze corespunzătoare cu Mach 4.
Racheta Bomarc B era prevăzută cu un cap de căutare autonomă a țintei, de tipul Westinghouse, cu un radar ce detecta obiectele aeriene ce evoluau în apropierea solului cât și la mare altitudine. Aceste capete de căutare pot descoperi de la altitudini de peste 20 000 m un inamic ce zboară la numai 15 m de sol.
Raza de acțiune a rachetei Bomarc B atingea 800 km și putea să ofere protecție unei suprafețe de 2 000 000 kmp.
Ambele variante (A și B) erau radioghidate cu începere de la sol și până în imediata apropiere a obiectivului. Semnalele radio erau declanșate de un calculator electronic din sistemul SAGE după interpretarea informațiilor primite de la toate stațiile radar ale sistemului.
Pentru ca sistemul de arme Bomarc să poată fi utilizat în zone care nu erau supravegheate nici de sistemul SAGE, nici de un alt sistem analog de informații și semnale radar, Boeing Aero-Space Division a pus la punct un procedeu denumit MANTRAC (Manual Angle Tracking Capability), bazat pe un principiu foarte simplu al triangulației, măsurarea unghiurilor formate de obiectiv și două repere cunoscute de la sol (două stații radar de căutare de la sol).
Relevmentul avionului atacant era transmis prin telefon de la aceste stații radar la centrala MANTRAC, unde indicațiile erau transcrise manual pe un ecran transparent cu ajutorul unui raportor, al unei rigle și al unui creion cerat.
Datorită acestei vizualizări a informațiilor, responsabilul cu lansarea putea să stabilească datele indispensabile lansării unei formații de rachete Bomarc.
O escadrilă cuprindea în mod obișnuit un număr de 28 de rachete, fiecare adăpostită într-un hangar climatizat din beton armat. Fiecare din cele 28 de instalații de lansare erau legate independent de centrul de comandă SAGE cel mai apropiat.
Prin apăsarea pe un buton la centrul SAGE, dalele grele de beton glisau și deschideau hangarul, rampele de lansare se ridicau vertical, după care un sistem de comandă și control efectua automat toate preparativele în vederea lansării. Hangarele nu erau deservite de personal, fiind suficient ca periodic o echipă de tehnicieni să efectueze o inspecție a instalațiilor.
Cu toate acestea, efectivul complet al unei baze de rachete Bomarc se ridica la aproximativ 275 oameni. Sistemul SAGE asigurând la distanță comanda în mod automat, rachetele pot fi gata de lansare în spațiu în timp de un minut, după care cele 28 de rachete ale escadrilei puteau fi teoretic lansate într-o singură secundă.
Centrul de control SAGE putea să ghideze simultan 200 de rachete IM - 99. Având o mare rază de acțiune, Bomarc putea să stationeze departe de centrele industriale sau locuite.
La o viteză de trei ori superioară celei a sunetului, IM-99, cântărind aproximativ 7 t, atingea obiective aeriene situate la distanțe pe care avioanele de vânătoare supersonice, de două ori mai grele, le parcurgeau de două ori mai încet.
Caracteristici tehnice ale rachetei Bomarc IM 99 B: Grup motopropulsor: 1 motor-rachetă cu combustibil pulbere Thiokol, 2 statoreactoare Marquardt RJ 43-MA-7 de 12 000 kgf Anvergura: 5,54 m Lungimea: 13,71 m Anvergură stabilizator: 3,20 m Diametru fuzelaj: 0,89 m Greutatea la lansare: 7 300 kg Viteza: Mach 2+ Altitudinea maximă: 21 500 m Distanța practică de zbor: 650 km Încărcătura explozivă clasică sau nucleară
GABRIEL GHEORGHIU
SERVOMECANISM - VARIATOR DE TURAȚIE
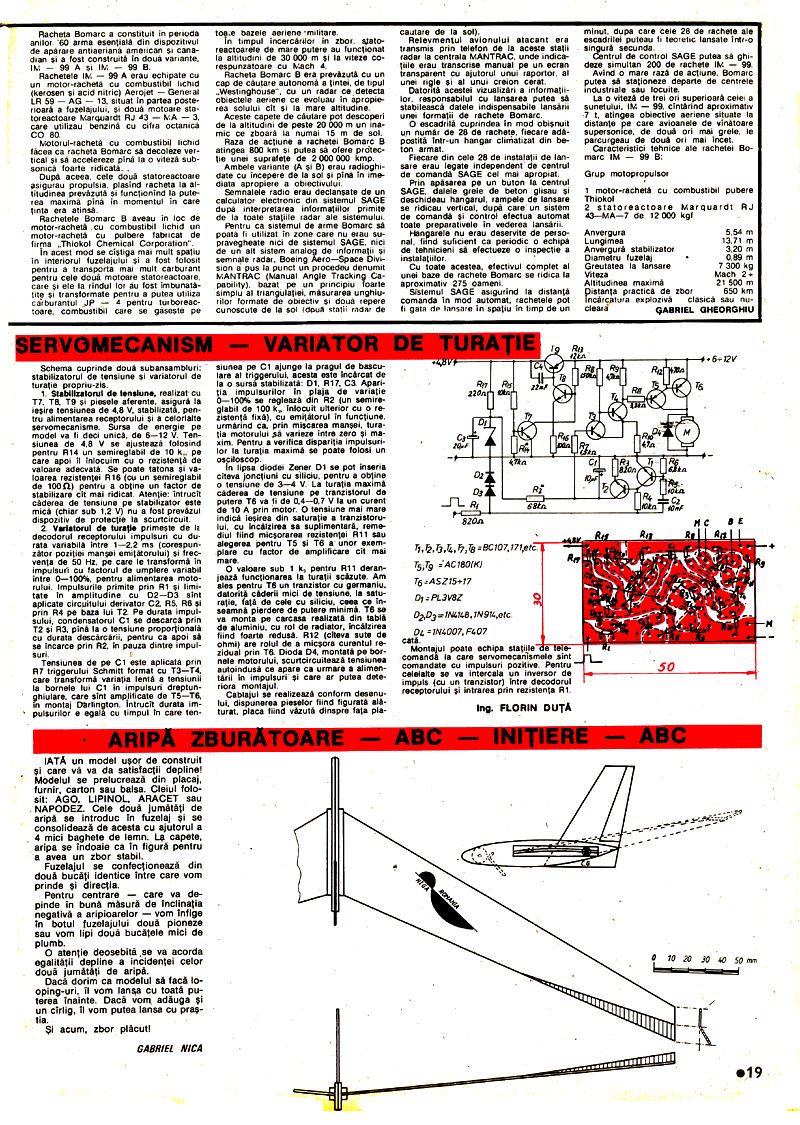
Schema cuprinde două subansambluri: stabilizatorul de tensiune și variatorul de turație propriu-zis.
1. Stabilizatorul de tensiune, realizat cu T7, T8, T9 și piesele aferente, asigură la ieșire tensiunea de 4,8 V, stabilizată, pentru alimentarea receptorului și a celorlalte servomecanisme. Sursa de energie pe model va fi deci unică, de 6-12 V. Tensiunea de 4,8 V se ajustează folosind pentru R14 un semireglabil de 10 kΩ, pe care apoi îl înlocuim cu o rezistență de valoare adecvată. Se poate tatona și valoarea rezistenței R16 (cu un semireglabil de 100Ω) pentru a obține un factor de stabilizare cât mai ridicat. Atenție: întrucât căderea de tensiune pe stabilizator este mică (chiar sub 1,2 V) nu a fost prevăzut dispozitiv de protecție la scurtcircuit.
2. Variatorul de turație primește de la decodorul receptorului impulsuri cu durata variabilă între 1-2,2 ms (corespunzător poziției manșei emițătorului) și frecvența de 50 Hz, pe care le transformă în impulsuri cu factorul de umplere variabil între 0-100%, pentru alimentarea motorului. Impulsurile primite prin R1 și limitate în amplitudine cu D2-D3 sunt aplicate circuitului derivator C2, R5, R6 și prin R4 pe baza lui T2. Pe durata impulsului, condensatorul C1 se descarcă prin T2 și R3, până la o tensiune proporțională cu durata descărcării, pentru ca apoi să se încarce prin R2, în pauza dintre impulsuri.
Tensiunea de pe C1 este aplicată prin R7 triggerului Schmitt format cu T3-T4 care transformă variația lentă a tensiunii la bornele lui C1 în impulsuri dreptunghiulare, care sunt amplificate de T5-T6, în montaj Darlington. Întrucât durata impulsurilor e egală cu timpul în care tensiunea pe C1 ajunge la pragul de basculare al triggerului, acesta este încărcat de la o sursă stabilizată: D1, R17, C3. Apariția impulsurilor în plaja de variație 0-100% se reglează din R2 (un semireglabil de 100 kΩ, înlocuit ulterior cu o rezistență fixă), cu emițătorul în funcțiune, urmărind ca, prin mișcarea manșei, turația motorului să varieze între zero și maxim. Pentru a verifica dispariția impulsurilor la turația maximă se poate folosi un osciloscop.
În lipsa diodei Zener D1 se pot înseria câteva joncțiuni cu siliciu, pentru a obține o tensiune de 3-4 V. La turația maximă căderea de tensiune pe tranzistorul de putere T6 va fi de 0,4-0,7 V la un curent de 10 A prin motor. O tensiune mai mare indică ieșirea din saturație a tranzistorului, cu încălzirea sa suplimentară, remediul fiind micșorarea rezistenței R11 sau alegerea pentru T5 și T6 a unor exemplare cu factor de amplificare cât mai mare.
O valoare sub 1 kΩ pentru R11 deranjează funcționarea la turații scăzute. Am ales pentru T6 un tranzistor cu germaniu, datorită căderii mici de tensiune la saturație, față de cele cu siliciu, ceea ce înseamnă pierdere de putere minimă. T6 se va monta pe carcasa realizată din tablă de aluminiu, cu rol de radiator, încălzirea fiind foarte redusă. R12 (câteva sute de ohmi) are rolul de a micșora curentul rezidual prin T6. Dioda D4, montată pe bornele motorului, scurtcircuitează tensiunea autoindusă ce apare ca urmare a alimentării în impulsuri și care ar putea deteriora montajul.
Cablajul se realizează conform desenului, dispunerea pieselor fiind figurată alăturat, placa fiind văzută dinspre fața plăcii.
Montajul poate echipa stațiile de telecomandă la care servomecanismele sunt comandate cu impulsuri pozitive. Pentru celelalte se va intercala un inversor de impuls (cu un tranzistor) între decodorul receptorului și intrarea prin rezistența R1.
Ing. FLORIN DUTA
ARIPA ZBURĂTOARE
IATĂ un model ușor de construit și care vă va da satisfacții depline!
Modelul se prelucrează din placaj, furnir, carton sau balsa. Cleiul folosit: AGO, LIPINOL, ARACET sau NAPODEZ. Cele două jumătăți de aripă se introduc în fuzelaj și se consolidează de acesta cu ajutorul a 4 mici baghete de lemn. La capete, aripa se îndoaie ca în figură pentru a avea un zbor stabil.
Fuzelajul se confecționează din două bucăți identice între care vom prinde și direcția.
Pentru centrare care va depinde în bună măsură de înclinația negativă a aripioarelor vom înfige în botul fuzelajului două pioneze sau vom lipi două bucățele mici de plumb.
O atenție deosebită se va acorda egalității depline a incidenței celor două jumătăți de aripă.
Dacă dorim ca modelul să facă looping-uri, îl vom lansa cu toată puterea înainte. Dacă vom adăuga și un cârlig, îl vom putea lansa cu praștia.
Și acum, zbor plăcut!
GABRIEL NICA