Vinci proporțional pentru vele
TELECOMANDĂ COLȚUL RC
VINCI PROPORȚIONAL PENTRU VELE
Echiparea unui velier telecomandat, clasa F5, impune achiziționarea unui vinci pentru acționarea velelor. Acesta poate fi procurat odată cu stația de telecomandă, dar la un preț nu întotdeauna accesibil. De aceea am încercat, cu succes, să construim o astfel de servocomandă, prin adaptarea unui servomecanism standard ce echipează orice fel de stație.
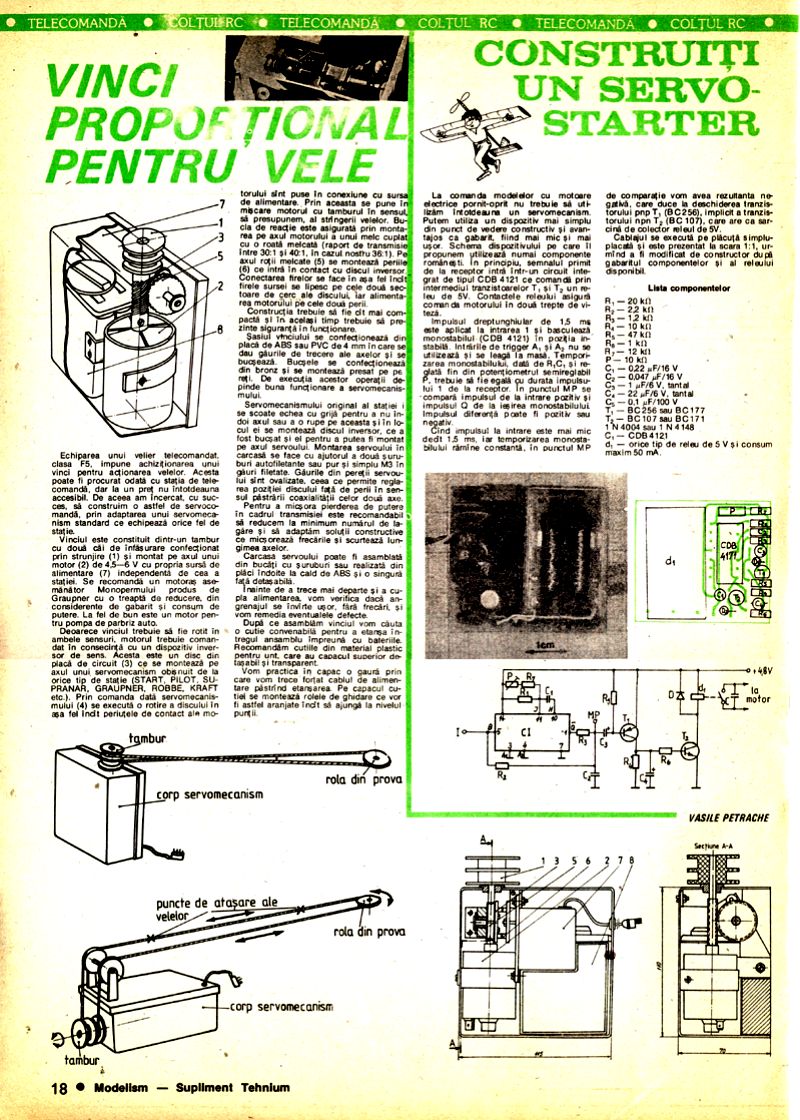
Vinciul este constituit dintr-un tambur cu două căi de înfășurare confecționat prin strunjire (1) și montat pe axul unui motor (2) de 4,5 ÷ 6 V cu propria sursă de alimentare (7) independentă de cea a stației. Se recomandă un motoaras asemenea Monopermului produs de Graupner cu o treaptă de reducere, din considerente de gabarit și consum de putere. La fel de bun este un motor pentru pompa de parbriz auto.
Deoarece vinciul trebuie să fie rotit în ambele sensuri, motorul trebuie comandat în consecință cu un dispozitiv inversor de sens. Acesta este un disc din placă de circuit (3) ce se montează pe axul unui servomecanism obișnuit de la orice tip de stație (START, PILOT, SUPRANAR, GRAUPNER, ROBBE, KRAFT etc.). Prin comanda dată servomecanismului (4) se execută o rotire a discului în așa fel încât periuțele de contact ale motorului sunt puse în conexiune cu sursa de alimentare. Prin aceasta se pune în mișcare motorul cu tamburul în sensul, să presupunem, al stringerii velelor. Bucla de reacție este asigurată prin montarea pe axul motorului a unui melc cuplat cu o roată melcată (raport de transmisie între 30:1 și 40:1, în cazul nostru 36:1). Pe axul roții melcate (5) se montează periile (6) ce intră în contact cu discul inversor. Conectarea firelor se face în așa fel încât firele sursei se lipesc pe cele două sectoare de cerc ale discului, iar alimentarea motorului pe cele două perií.
Construcția trebuie să fie cât mai compactă și în același timp trebuie să prezinte siguranță în funcționare.
Șasiul vinciului se confecționează din placă de ABS sau PVC de 4 mm în care se dau găurile de trecere ale axelor și se bucsează. Bucsele se confecționează din bronz și se montează presat pe pereți. De execuția acestor operații depinde buna funcționare a servomecanismului.
Servomecanismului original al stației se scoate biela cu grijă pentru a nu îndoi axul sau a o rupe pe aceasta și în locul ei se montează discul inversor, ce a fost bucsat și el pentru a putea fi montat pe axul servoului. Montarea servoului în carcasă se face cu ajutorul a două șuruburi autofiletante sau pur și simplu M3 în găuri filetate. Găurile din pereții servoului sunt ovalizate, ceea ce permite reglarea poziției discului față de perií în sensul păstrării coaxialității celor două axe.
Pentru a micșora pierderea de putere în cadrul transmisiei este recomandabil să reducem la minimum numărul de lagăre și să adaptăm soluții constructive ce micșorează frecările și scurtează lungimea axelor.
Carcasa servoului poate fi asamblată din bucăți cu șuruburi sau realizată din plăci îndoite la cald de ABS și o singură față detașabilă.
Înainte de a trece mai departe și a cupla alimentarea, vom verifica dacă angrenajul se învârte ușor, fără frecări, și vom remedia eventualele defecte.
După ce asamblăm vinciul vom căuta o cutie convenabilă pentru a etanșa întregul ansamblu împreună cu bateriile. Recomandăm cutiile din material plastic pentru unt, care au capacul superior detașabil și transparent.
Vom practica în capac o gaură prin care vom trece forțat cablul de alimentare păstrând etanșarea. Pe capacul cutiei se montează rolele de ghidare ce vor fi astfel aranjate încât să ajungă la nivelul punții.
CONSTRUIȚI UN SERVO-STARTER
La comanda modelelor cu motoare electrice pornit-oprit nu trebuie să utilizăm întotdeauna un servomecanism. Putem utiliza un dispozitiv mai simplu din punct de vedere constructiv și avantajos ca gabarit, fiind mai mic și mai ușor. Schema dispozitivului pe care îl propunem utilizează numai componente românești. În principiu, semnalul primit de la receptor intră într-un circuit integrat de tipul CDB 4121 ce comandă prin intermediul tranzistoarelor T₁ și T₂ un releu de 5V. Contactele releului asigură comanda motorului în două trepte de viteză.
Impulsul dreptunghiular de 1,5 ms este aplicat la intrarea 1 și basculează monostabilul (CDB 4121) în porția instabilă. Intrările de trigger A₁ și A₂ nu se utilizează și se leagă la masă. Temporizarea monostabilului, dată de R₁C₁ și reglată fin din potențiometrul semireglabil, trebuie să fie egală cu durata impulsului 1 de la receptor. În punctul MP se compară impulsul de la intrare pozitiv și impulsul Q de la ieșirea monostabilului. Impulsul diferență poate fi pozitiv sau negativ.
Când impulsul la intrare este mai mic decât 1,5 ms, iar temporizarea monostabilului rămâne constantă, în punctul MP de comparație vom avea rezultanta negativă, care duce la deschiderea tranzistorului pnp T₁ (BC256), implicit a tranzistorului npn T₂ (BC 107), care are ca sarcină de colector releul de 5V.
Cablajul se execută pe plăcuță simplu-placată și este prezentat la scara 1:1, urmând a fi modificat de constructor după gabaritul componentelor și al releului disponibil.
Lista componentelor: R₁ - 20 kΩ R₂ - 22 kΩ R₃ - 12 kΩ R₄ - 10 kΩ R₅ - 47 kΩ R₆ - 1 kΩ R₇ - 12 kΩ P - 10 kΩ C₁ - 0,22 μF/16 V C₂ - 10 μF/6 V, tantal C₃ - 22 μF/6 V, tantal C₄ - 0,1 μF/100 V T₁ - BC256 sau BC 177 T₂ - BC 107 sau BC171 d₁ - 1N 4004 sau 1N4148 CI - CDB 4121 R - orice tip de releu de 5 V și consum maxim 50 mA.
VASILE PETRACHE