Comanda a două relee tot sau nimic pe un canal al stației digital proporționale
În cazul navomodelelor radiotelecomandate și acționate electric, cum sunt cele din clasele F2, este necesar un dispozitiv electric sau electronic, care, fiind comandat de un emițător digital-proporțional, pune sub tensiune, într-un sens sau în celălalt, motorul sau motoarele de acționare a elicelor modelului.
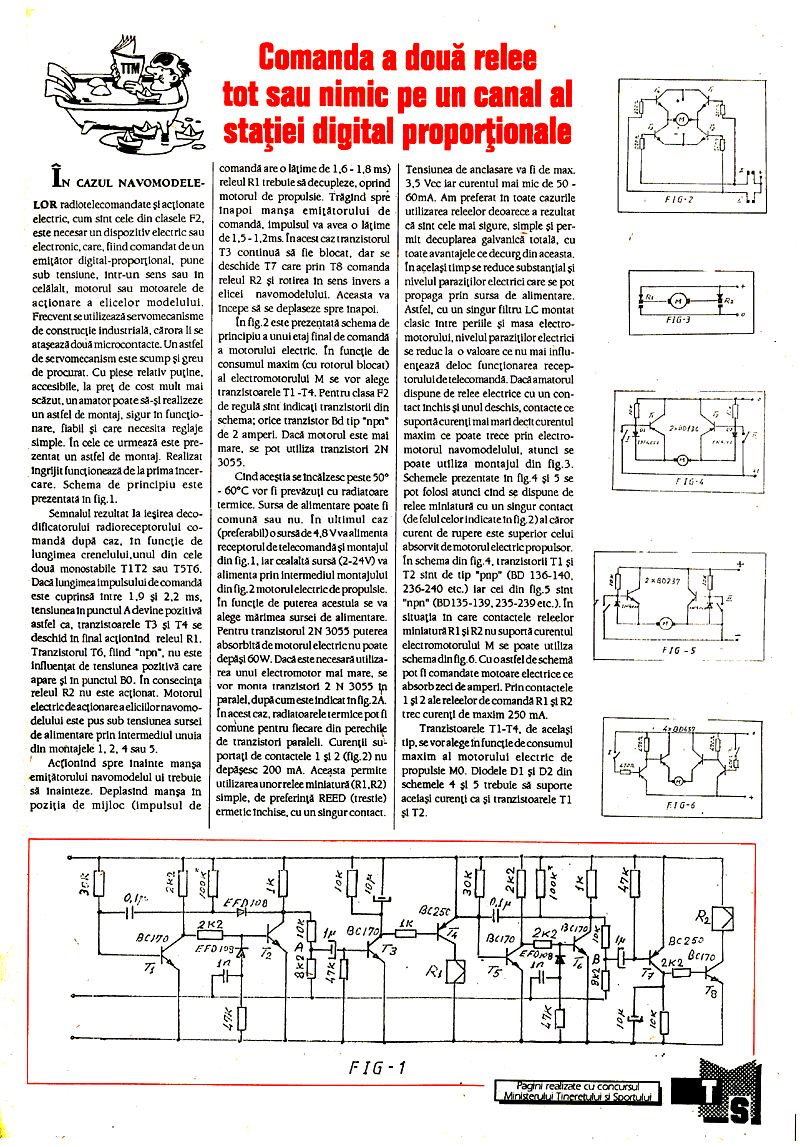
Frecvent se utilizează servomecanisme de construcție industrială, cărora li se atașează două microcontacte. Un astfel de servomecanism este scump și greu de procurat. Cu piese relativ puține, accesibile, la preț de cost mult mai scăzut, un amator poate să-și realizeze un astfel de montaj, sigur în funcționare, fiabil și care necesită reglaje simple. În cele ce urmează este prezentat un astfel de montaj. Realizat îngrijit funcționează de la prima încercare. Schema de principiu este prezentată în fig. 1.
Semnalul rezultat la ieșirea decodificatorului radioreceptorului comandă după caz, în funcție de lungimea crenelului, unul din cele două monostabile T1T2 sau T5T6. Dacă lungimea impulsului de comandă este cuprinsă între 1,9 și 2,2 ms, tensiunea în punctul A devine pozitivă astfel că, tranzistoarele T3 și T4 se deschid în final acționând releul R1. Tranzistorul T6, fiind "oprit", nu este influențat de tensiunea pozitivă care apare și în punctul B0. În consecință releul R2 nu este acționat. Motorul electric de acționarea elicilor navomodelului este pus sub tensiunea sursei de alimentare prin intermediul unuia din montajele 1, 2, 4 sau 5.
Acționând spre înainte manșa emițătorului navomodelului trebuie să înainteze. Deplasând manșa în poziția de mijloc (impulsul de comandă are o lățime de 1,6-1,8 ms) releul R1 trebuie să decupleze, oprind motorul de propulsie. Trăgând spre înapoi manșa emițătorului de comandă, impulsul va avea o lățime de 1,5-1,2ms. În acest caz tranzistorul T3 continuă să fie blocat, dar se deschide T7 care prin T8 comandă releul R2 și rotirea în sens invers a eliței navomodelului. Aceasta va începe să se deplaseze spre înapoi.
În fig.2 este prezentată schema de principiu a unui etaj final de comandă a motorului electric. În funcție de consumul maxim (cu rotorul blocat) al electromotorului M se vor alege tranzistoarele T1-T4. Pentru clasa F2 de regulă sunt indicați tranzistorii din schemă; orice tranzistor de tip "npn" de 2 amperi. Dacă motorul este mai mare, se pot utiliza tranzistori 2N 3055.
Când aceștia se încălzesc peste 50°-60°C vor fi prevăzuți cu radiatoare termice. Sursa de alimentare poate fi comună sau nu. În ultimul caz (preferabil) o sursă de 4,8V va alimenta receptorul de telecomandă și montajul din fig. 1, iar cealaltă sursă (2-24V) va alimenta prin intermediul montajului din fig.2 motorul electric de propulsie. În funcție de puterea acestuia se va alege mărimea sursei de alimentare. Pentru tranzistorul 2N 3055 puterea absorbită de motorul electric nu poate depăși 60W. Dacă este necesară utilizarea unui electromotor mai mare, se vor monta tranzistori 2N 3055 în paralel, după cum este indicat în fig. 2A. În acest caz, radiatoarele termice pot fi comune pentru fiecare din perechile de tranzistori paraleli. Curenții suportați de contactele 1 și 2 (fig.2) nu depășesc 200 mA. Aceasta permite utilizarea unor relee miniatură (R1,R2) simple, de preferință REED (trestie) ermetic închise, cu un singur contact.
Tensiunea de anclanșare va fi de max. 3,5 V iar curentul mai mic de 50-60mA. Am preferat în toate cazurile utilizarea releelor deoarece a rezultat că sunt cele mai sigure, simple și permit decuplarea galvanică totală, cu toate avantajele ce decurg din aceasta. În același timp se reduce substanțial și nivelul paraziților electrici care se pot propaga prin sursa de alimentare. Astfel, cu un singur filtru LC montat clasic între periile și masa electromotorului, nivelul paraziților electrici se reduc la o valoare ce nu mai influențează deloc funcționarea receptorului de telecomandă.
Dacă amatorul dispune de relee electrice cu un contact închis și unul deschis, contacte ce suportă curenți mai mari decât curentul maxim ce poate trece prin electromotorul navomodelului, atunci se poate utiliza montajul din fig.3.
Schemele prezentate în fig.4 și 5 se pot folosi atunci când se dispune de relee miniatură cu un singur contact (de felul celor indicate în fig. 2) al căror curent de rupere este superior celui absorbit de motorul electric propulsor. În schema din fig.4, tranzistorii T1 și T2 sunt de tip "pnp" (BD 136-140, 236-240 etc.) iar cei din fig.5 sunt "npn" (BD135-139, 235-239 etc.). În situația în care contactele releelor miniatură R1 și R2 nu suportă curentul electromotorului M se poate utiliza schema din fig. 6. Cu o astfel de schemă pot fi comandate motoare electrice ce absorb zeci de amperi. Prin contactele 1 și 2 ale releelor de comandă R1 și R2 trec curenți de maxim 250 mA.
Tranzistoarele T1-T4, de același tip, se vor alege în funcție de consumul maxim al motorului electric de propulsie M0. Diodele D1 și D2 din schemele 4 și 5 trebuie să suporte aceiași curenți ca și tranzistoarele T1 și T2.
Comandă după caz, în funcție de lungimea crenelului, unul din cele două monostabile tot sau nimic pe un canal al stației digital proporționale