Diferențial pentru automodele radiocomandate
AMBREIAJ PENTRU AUTOMODELE RADIOCOMANDATE
Una dintre categoriile cele mai spectaculoase ale automodelelor radiocomandate este cea cunoscută în limbajul de specialitate sub numele de RCT 3,5-7 cm³.
Este o categorie în cadrul căreia pot participa automodele (copii ale unor modele existente sau prototipuri) la scara 1:8, radiocomandate și echipate cu motoare termice de 3,5 sau de la 3,5 la 7 cm³. Proba se desfășoară pe un circuit cu o lungime de 240-300 m și constă dintr-o alergare în grup (6-8 modele), urmărindu-se realizarea unui număr cât mai mare de ture într-un interval de timp dat (5 min până la 30 min).
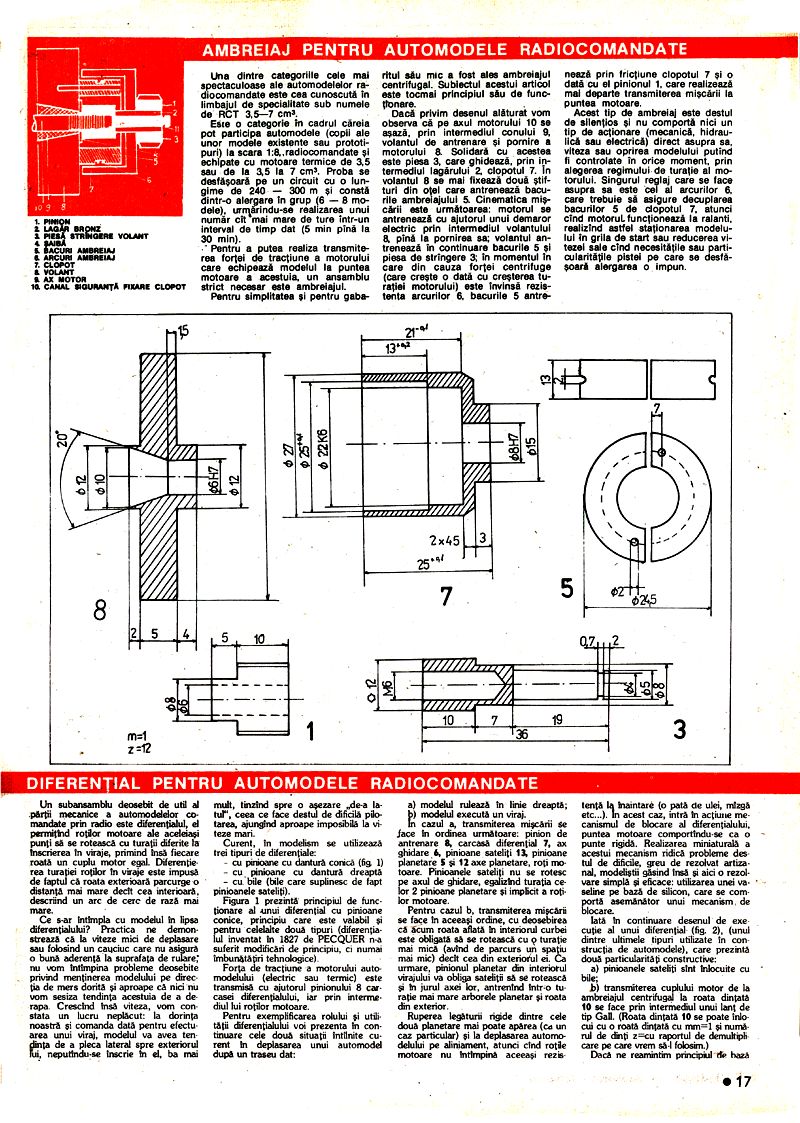
Pentru a putea realiza transmiterea forței de tracțiune a motorului care echipează modelul la puntea motoare a acestuia, un ansamblu strict necesar este ambreiajul. Pentru simplitatea și pentru gabaritul său mic a fost ales ambreiajul centrifugal. Subiectul acestui articol este tocmai principiul său de funcționare.
Dacă privim desenul alăturat vom observa că pe axul motorului se așază, prin intermediul conului, volantul de antrenare și pornire a motorului. Solidară cu acestea este piesa care ghidează, prin intermediul lagărului, clopotul. În volantul se mai fixează două știfturi din oțel care antrenează bacurile ambreiajului. Cinematica mișcării este următoarea: motorul se antrenează cu ajutorul unui demaror electric prin intermediul volantului până la pornirea sa; volantul antrenează în continuare bacurile și piesa de stringere; în momentul în care din cauza forței centrifuge (care crește o dată cu creșterea turației motorului) este învinsă rezistența arcurilor, bacurile antrenează prin fricțiune clopotul și odată cu el pinionul, care realizează mai departe transmiterea mișcării la puntea motoare.
Acest tip de ambreiaj este destul de silențios și nu comportă nici un tip de acționare (mecanică, hidraulică sau electrică) direct asupra sa, viteza sau oprirea modelului putând fi controlate în orice moment, prin alegerea regimului de turație al motorului. Singurul reglaj care se face asupra sa este cel al arcurilor, care trebuie să asigure decuplarea bacurilor de clopotul, atunci când motorul funcționează la ralanti, realizând astfel staționarea modelului în grila de start sau reducerea vitezei sale când necesitățile sau particularitățile pistei pe care se desfășoară alergarea o impun.
DIFERENȚIAL PENTRU AUTOMODELE RADIOCOMANDATE
Un subansamblu deosebit de util al părții mecanice a automodelelor comandate prin radio este diferențialul, el permițând roților motoare ale aceleiași punți să se rotească cu turații diferite la înscrierea în viraje, primind însă fiecare roată un cuplu motor egal. Diferențierea turației roților în viraje este impusă de faptul că roata exterioară parcurge o distanță mai mare decât cea interioară, descriind un arc de cerc de rază mai mare.
Ce s-ar întâmpla cu modelul în lipsa diferențialului? Practica ne demonstrează că la viteze mici de deplasare sau folosind un cauciuc care nu asigură o bună aderență la suprafața de rulare, nu vom întâmpina probleme deosebite privind menținerea modelului pe direcția de mers dorită și aproape că nici nu vom sesiza tendința acestuia de a derapa. Crescând însă viteza, vom constata un lucru neplăcut: la dorința noastră și comanda dată pentru efectuarea unui viraj, modelul va avea tendința de a pleca lateral spre exteriorul lui, neputându-se înscrie în el, ba mai mult, tindând spre o așezare „de-a latul", ceea ce face destul de dificilă pilotarea, ajungând aproape imposibilă la viteze mari.
Curent, în modelism se utilizează trei tipuri de diferențiale: - cu pinioane cu dantură conică - cu pinioane cu dantură dreaptă - cu bile (bile care suplinesc de fapt pinioanele sateliți).
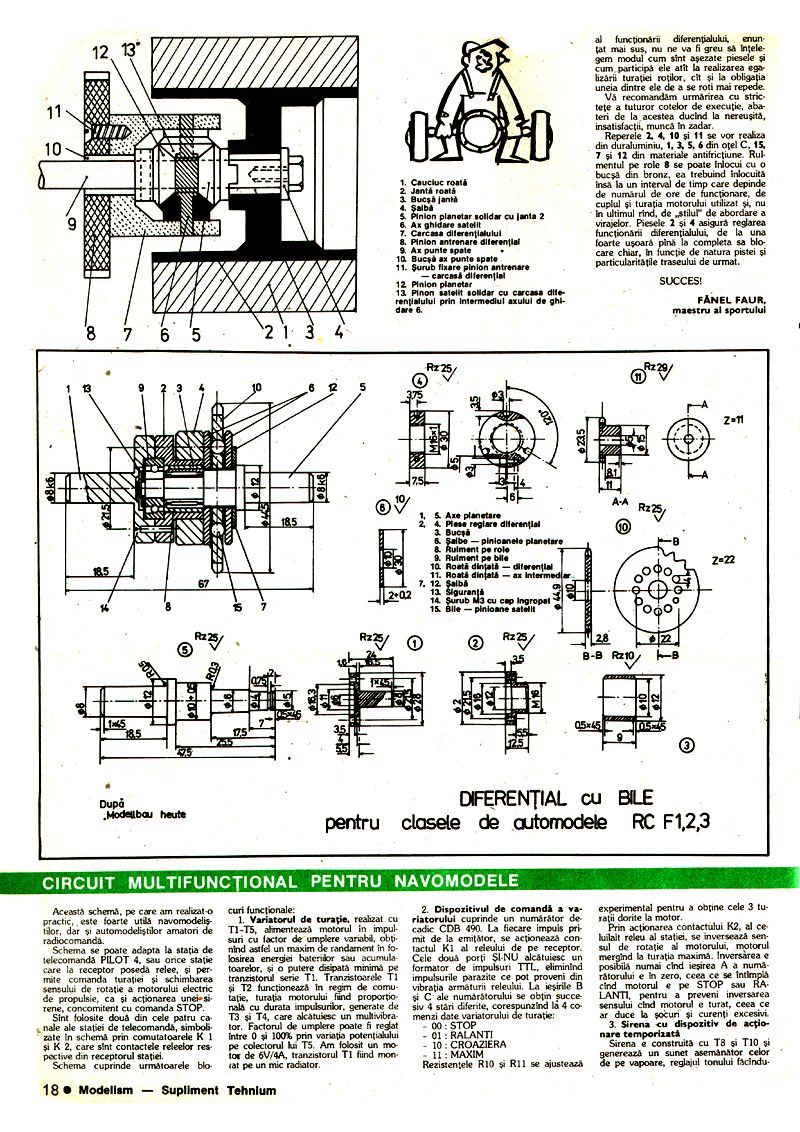
Figura prezintă principiul de funcționare al unui diferențial cu pinioane conice, principiu care este valabil și pentru celelalte două tipuri (diferențialul inventat în 1827 de PECQUER n-a suferit modificări de principiu, ci numai îmbunătățiri tehnologice).
Forța de tracțiune a motorului automodelului (electric sau termic) este transmisă cu ajutorul pinionului carcasei diferențialului, iar prin intermediul lui roților motoare.
Pentru exemplificarea rolului și utilității diferențialului voi prezenta în continuare cele două situații întâlnite curent în deplasarea unui automodel după un traseu dat: a) modelul rulează în linie dreaptă; b) modelul execută un viraj.
În cazul a, transmiterea mișcării se face în ordinea următoare: pinion de antrenare, carcasă diferențial, ax ghidare, pinioane sateliți, pinioane planetare și axe planetare, roți motoare. Pinioanele sateliți nu se rotesc pe axul de ghidare, egalizând turația celor 2 pinioane planetare și implicit a roților motoare.
Pentru cazul b, transmiterea mișcării se face în aceeași ordine, cu deosebirea că acum roata aflată în interiorul curbei este obligată să se rotească cu o turație mai mică (având de parcurs un spațiu mai mic) decât cea din exteriorul ei. Ca urmare, pinionul planetar din interiorul virajului va obliga sateliții să se rotească și în jurul axei lor, antrenând într-o turație mai mare arborele planetar și roata din exterior.
Ruperea legăturii rigide dintre cele două planetare mai poate apărea (ca un caz particular) și la deplasarea automodelului pe aliniament, atunci când roțile motoare nu întâmpină aceeași rezistență la înaintare (o pată de ulei, mizgă etc...). În acest caz, intră în acțiune mecanismul de blocare al diferențialului, puntea motoare comportându-se ca o punte rigidă. Realizarea miniaturală a acestui mecanism ridică probleme destul de dificile, greu de rezolvat artizanal, modeliștii găsind însă și aici o rezolvare simplă și eficace: utilizarea unei vaseline pe bază de silicon, care se comportă asemănător unui mecanism de blocare.
Iată în continuare desenul de execuție al unui diferențial (unul dintre ultimele tipuri utilizate în construcția de automodele), care prezintă două particularități constructive: a) pinioanele sateliți sunt înlocuite cu bile; b) transmiterea cuplului motor de la ambreiajul centrifugal la roata dințată se face prin intermediul unui lanț de tip Gall. (Roata dințată se poate înlocui cu o roata dințată cu mm-1 și numărul de dinți z=cu raportul de demultiplicare pe care vrem să-l folosim.)
Dacă ne reamintim principiul de bază al funcționării diferențialului, enunțat mai sus, nu ne va fi greu să înțelegem modul cum sunt așezate piesele și cum participă ele atât la realizarea egalizării turației roților, cât și la obligația uneia dintre ele de a se roti mai repede.
Vă recomandăm urmărirea cu strictețe a tuturor cotelor de execuție, abateri de la acestea ducând la nereușită, insatisfacții, muncă în zadar.
Reperele se vor realiza din duraluminiu, din oțel, din materiale antifricțiune. Rulmentul pe role se poate înlocui cu o bucșă din bronz, ea trebuind înlocuită însă la un interval de timp care depinde de numărul de ore de funcționare, de cuplul și turația motorului utilizat și, nu în ultimul rând, de stilul de abordare a virajelor. Piesele asigură reglarea funcționării diferențialului, de la una foarte ușoară până la completa sa blocare chiar, în funcție de natura pistei și particularitățile traseului de urmat.
SUCCES! FANEL FAUR, maestru al sportului
DIFERENȚIAL cu BILE pentru clasele de automodele RC F1,2,3
CIRCUIT MULTIFUNCȚIONAL PENTRU NAVOMODELE
Această schemă, pe care am realizat-o practic, este foarte utilă navomodeliștilor, dar și automodeliștilor amatori de radiocomandă.
Schema se poate adapta la stația de telecomandă PILOT 4, sau orice stație care la receptor posedă relee, și permite comanda turației și schimbarea sensului de rotație a motorului electric de propulsie, ca și acționarea unei sirene, concomitent cu comanda STOP.
Sunt folosite două din cele patru canale ale stației de telecomandă, simbolizate în schemă prin comutatoarele K1 și K2, care sunt contactele releelor respective din receptorul stației.
Schema cuprinde următoarele blocuri funcționale:
1. Variatorul de turație, realizat cu T1-T5, alimentează motorul în impulsuri cu factor de umplere variabil, obținând astfel un maxim de randament în folosirea energiei bateriilor sau acumulatoarelor, și o putere disipată minimă pe tranzistorul serie T1. Tranzistoarele T1 și T2 funcționează în regim de comutație, turația motorului fiind proporțională cu durata impulsurilor, generate de T3 și T4, care alcătuiesc un multivibrator. Factorul de umplere poate fi reglat între 0 și 100% prin variația potențialului pe colectorul lui T5. Am folosit un motor de 6V/4A, tranzistorul T1 fiind montat pe un mic radiator.
2. Dispozitivul de comandă a variatorului cuprinde un numărător de cadru CDB 490. La fiecare impuls primit de la emițător, se acționează contactul K1 al releului de pe receptor. Cele două porți ȘI-NU alcătuiesc un formator de impulsuri TTL, eliminând impulsurile parazite ce pot proveni din vibrația armăturii releului. La ieșirile B și C ale numărătorului se obțin succesiv 4 stări diferite, corespunzând la 4 comenzi date variatorului de turație: - 00: STOP - 01: RALANTI - 10: CROAZIERĂ - 11: MAXIM
Rezistențele R10 și R11 se ajustează experimental pentru a obține cele 3 turații dorite la motor.
Prin acționarea contactului K2, al celuilalt releu al stației, se inversează sensul de rotație al motorului, motorul mergând la turația maximă. Inversarea e posibilă numai când ieșirea A a numărătorului e în zero, ceea ce se întâmplă când motorul e pe STOP sau RALANTI, pentru a preveni inversarea sensului când motorul e turat, ceea ce ar duce la șocuri și curenți excesivi.
3. Sirena cu dispozitiv de acționare temporizată
Sirena e construită cu T8 și T10 și generează un sunet asemănător celor de pe vapoare, reglajul tonului făcându-